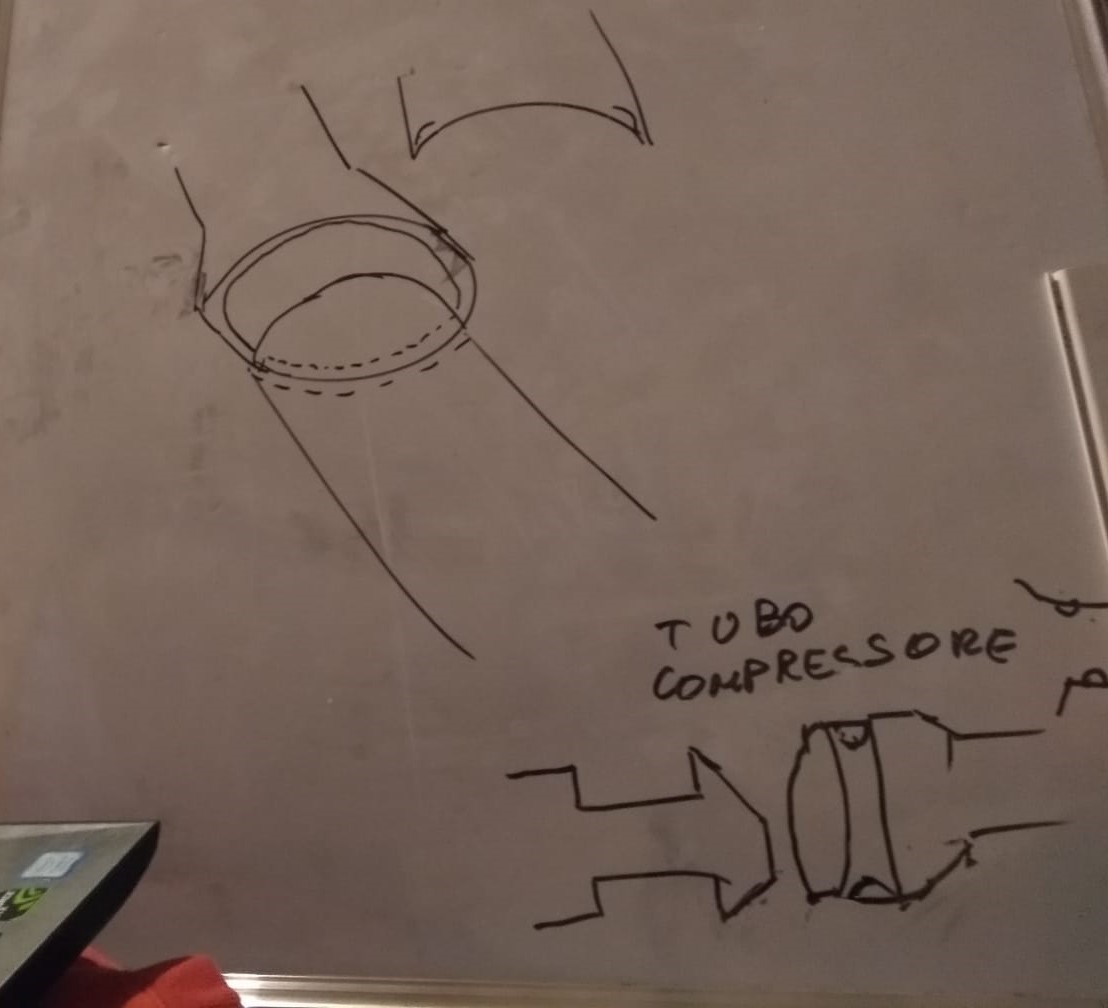
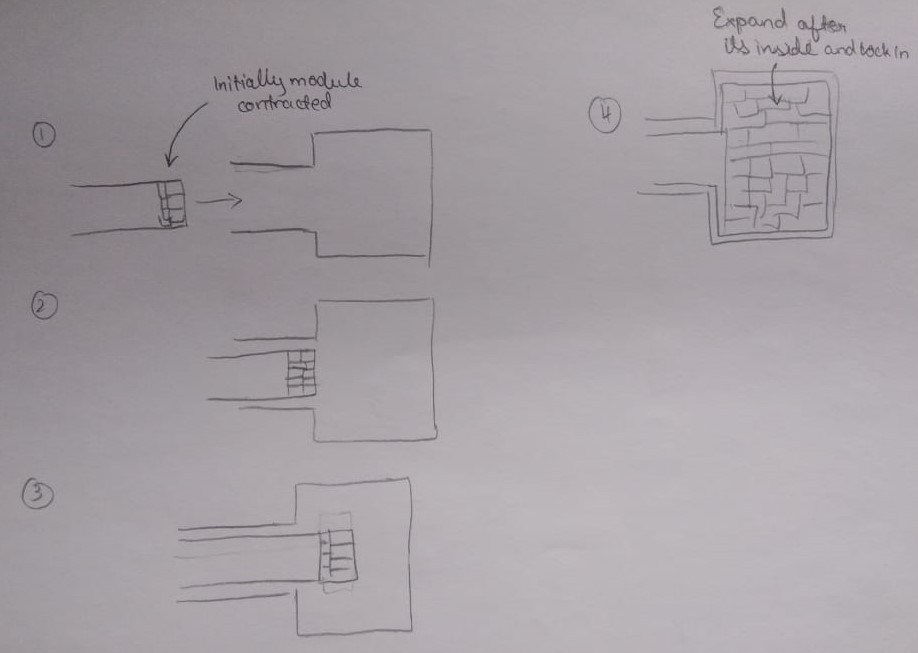
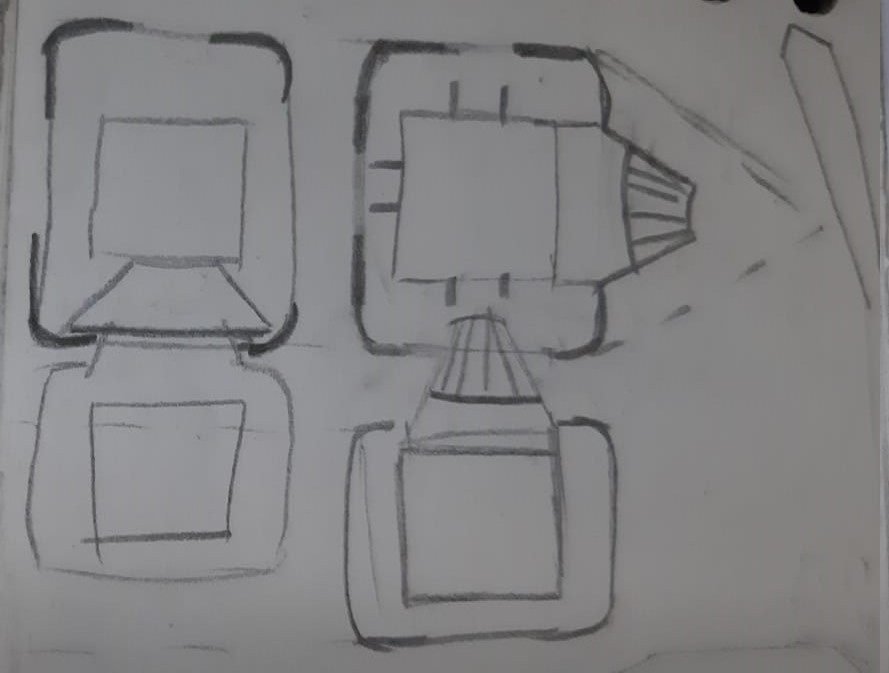
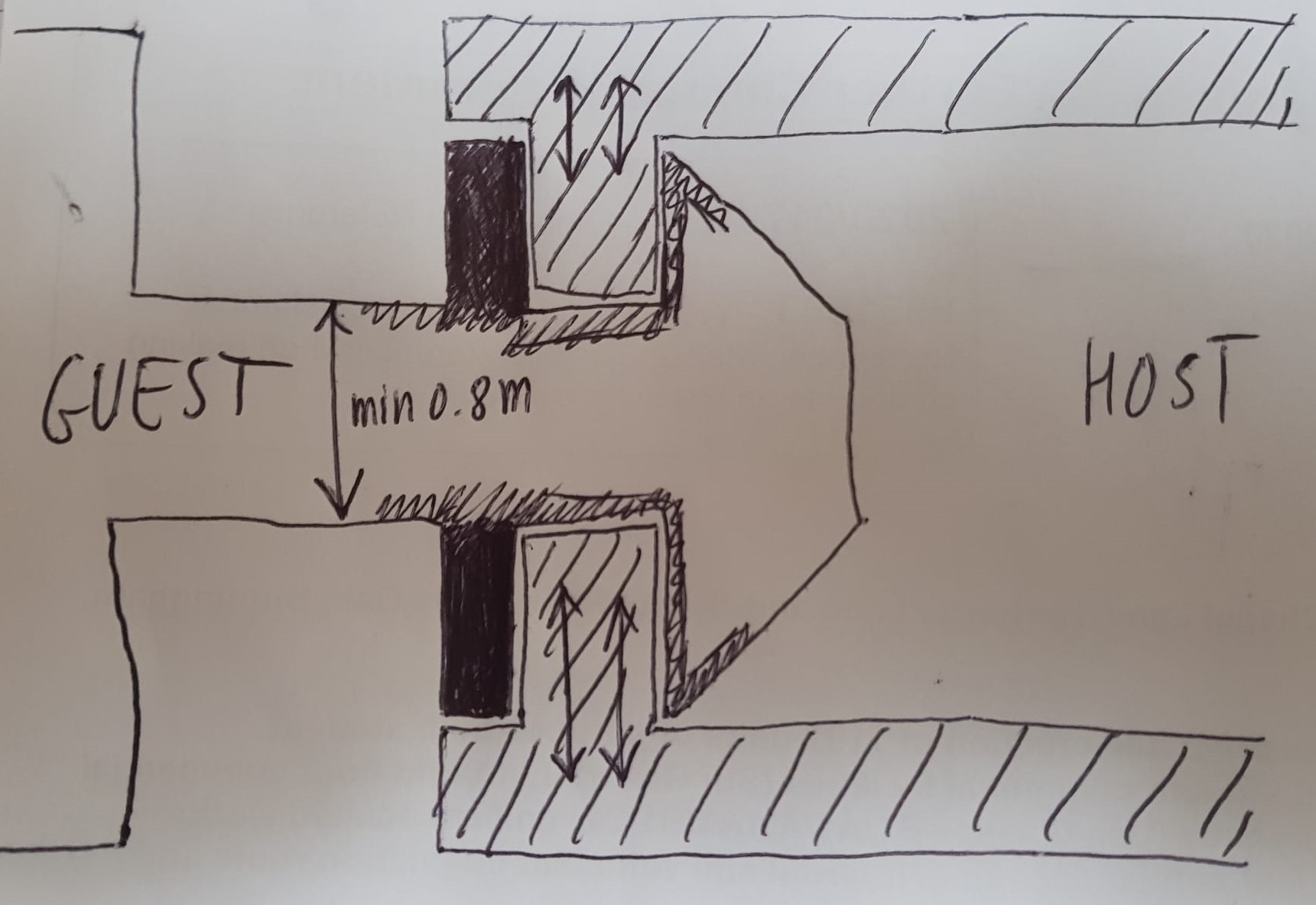
We had many ideas in the brainstorming session, some of them were sketched and are shown below. After researching current technnologies and comparing them with our ideas, we were able to select a final design. The criteria used in the selection were functionality, safety and cost minimization. We then proceeded to identify the appropriate materials to operate as required in the harsh conditions of space.
The sketches above show the brainstorming done by the team, with the last one being the final mechanism developed for the model.
Modern technologies and research are increasingly dependent on space-based technologies.
While the space environment proves advantageous for numerous reasons ranging from lack of atmospheric interference to clearer observations, a major drawback is the
limitation of the dimensions of the satellite. The increasing complexity of recent space missions often results in the requirement of larger equipment size.
This poses transportation challenges to move infrastructure in space via single rocket launches.
Placing larger satellites such as the James Webb Space Telescope amongst others has the added risk of overshooting launch vehicles’ capabilities and
increases the risk of damage. Current assembly techniques involve highly complex robotic arms. However, although robotics and in-person assembly may
achieve the accuracy needed, they significantly increase costs and result in higher risk factors. The future leans on in-space assembly techniques
and transportation of parts with multiple launches to minimize risk and resources. The detailed overview is explained under the Research section.
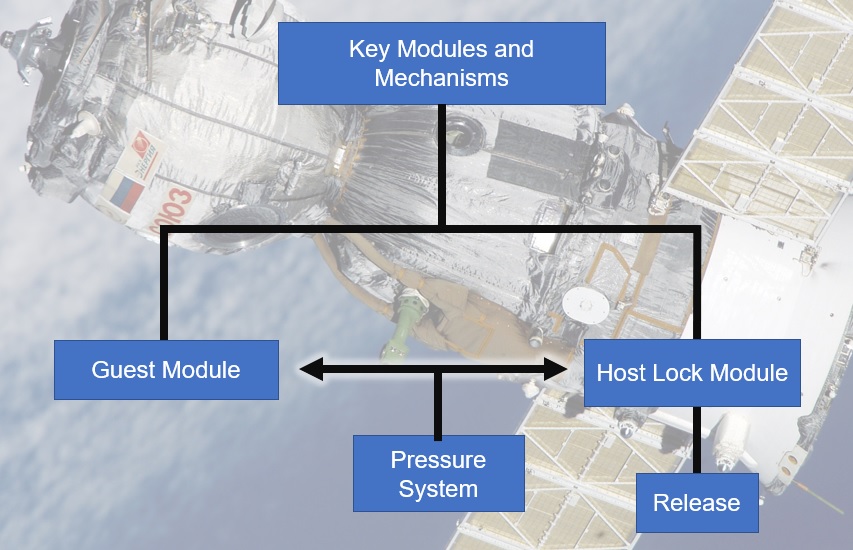
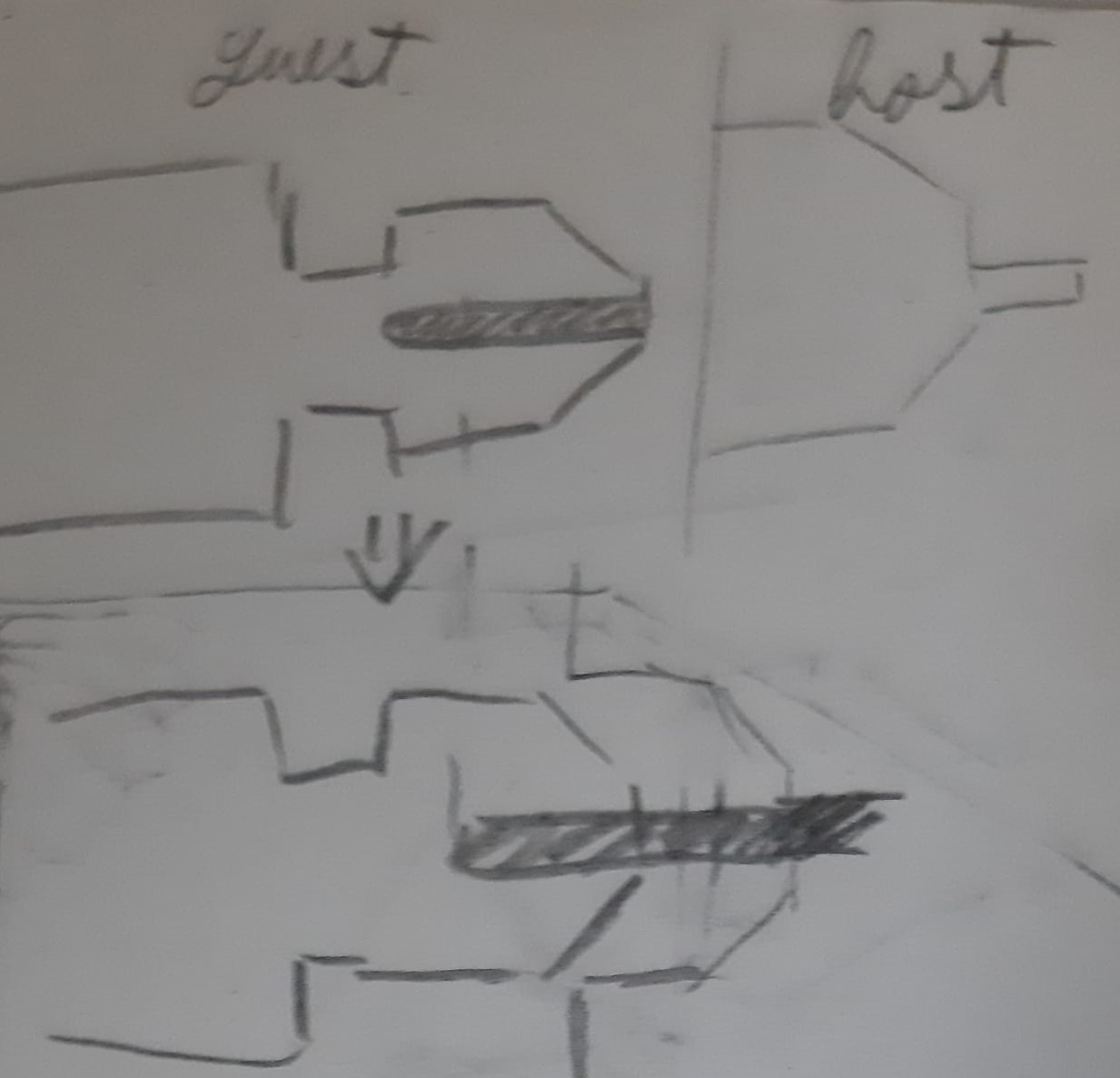
Guest Module
A tentative positioning and rotational alignment is obtained via RF beacons. For increased precision and final positioning,
a method similar to the one used in the ISS (host) sensors can be implemented. Four monopropellant thrusters with a compound
such as hydrazine are used to obtain this alignment.
Host Module
The clamps retract to allow the guest module to slide in. After the widest cross-section has passed, the clamps
return to their original position to lock in place. The clamps are coated with vulcanized rubber to enhance
sealing for pressurization.
Pressure Systems (for manned and material transport missions)
This is activated post-clamping. Nitrogen gas is inserted to verify the absence of gaps which cause leaks between guest and host.
A nitrogen removal valve can be incorporated here to prevent insertion of excess nitrogen as this may compromise
stress-related structural integrity. The nitrogen can then be flushed and replaced with oxygen to create habitable conditions
in the host chamber.
This is particularly useful for manned missions to prevent accidents due to depressurisation in case of motion
between the modules.
Release Mechanism
To release the guest module, the host chamber is depressurised and the clamps may be retracted using a simple hydraulic
system. Thrusters can then be activated to propel the guest away from the host module.
The video below demonstrates the functionality of the clamps in the host module as the guest approaches.
Filippo Falezza
Digital Mastermind: Coded the website, edited the demonstration and modeled the guest module in Blender. Designed the pressure system alongside Jatinder Singh.
Eleonora De Giorgi
Researcher General: Researched materials and compiled references. Designed the final form of the locking system. Helped with writing the project, proofreading and designing the website.
Jatinder Singh
Perfectionist Artificer: Designed the scene of the animation, refined and rendered it using Blender. Designed the pressure system alongside Filippo Falezza. Helped with website design.
Raluca Pantilie
Master of Illusions: Made the animation in the demonstration and modeled the host in Blender. Researched existing systems.
Anwesha Sahu
Wizard of Words: Initiated our participation in SpaceApps. Wrote paragraphs on the website and project layout. Conducted materials research.